Спинальное движение - Spinal locomotion

Спинальная локомоция результат сложных динамических взаимодействий между центральная программа в нижний грудопоясничный отдел позвоночника и проприоцептивная обратная связь от тела при отсутствии централизованного управления мозг как при полном повреждении спинного мозга (ТСМ).[1][2][3][4] После ТСМ спинномозговая цепь ниже места поражения не замолкает, а продолжает сохранять активные и функциональные свойства нейронов, хотя и в измененном виде.[5][6]
Компоненты движения позвоночника

Централизованно генерируемые шаблоны
Спинной мозг выполняет ритмическую и последовательную активацию мышц при движении. Центральный генератор паттернов (CPG) обеспечивает базовый локомоторный ритм и синергию путем интеграции команд из различных источников, которые служат для инициирования или модуляции его вывода в соответствии с требованиями окружающей среды. CPG в пояснично-крестцовых сегментах спинного мозга представляет собой важный компонент общей схемы, которая генерирует и контролирует поза и движение.[7] Эта спинномозговая цепь может функционировать независимо при отсутствии нисходящего сигнала от мозга для создания стабильной позы и передвижения и даже модуляции активности в соответствии с изменяющимися условиями (например, при переходе через препятствия).[8] Эта способность улучшается с тренировкой (пластичность позвоночника).[7] и поэтому считается, что спинной мозг способен учиться и запоминать.[9][10]
Сенсорная обратная связь
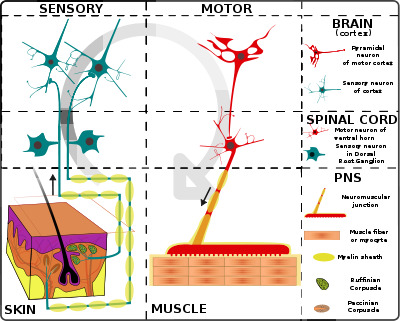
В сенсорная обратная связь происходит из мышцы, суставы, сухожилия и кожные афференты а также от особые чувства и динамически приспосабливает локомоторный паттерн спинного мозга к требованиям окружающей среды. Эти афферентный Рецепторы чувств воспринимать деформацию ткани, величину давления (растяжение или просто размещение), направление движения, скорость и скорость, с которой происходит движение.
Сенсорная модуляция CPG
Динамическое взаимодействие между спинным мозгом и сенсорным входом обеспечивается за счет модулирующий передача по локомоторным путям в зависимости от состояния и фазы. Например, проприоцептивные сигналы от разгибателей могут во время стойки регулировать синхронизацию и амплитуду мышечной активности конечностей в соответствии со скоростью передвижения, но подавляются во время фазы качания цикла. Точно так же кожные афференты преимущественно участвуют в коррекции положения конечностей и ступней во время стойки на неровной местности, но кожные раздражители могут вызывать различные типы реакций в зависимости от того, когда они возникают в пределах шаговый цикл.[11] Важно отметить, что сигналы от бедра, по-видимому, играют решающую роль в движении позвоночника. Эксперименты на животных с позвоночником показали, что, когда одна конечность удерживается согнутым бедром, движение на этой стороне прекращается, а другая конечность продолжает ходить. Однако, когда остановившаяся конечность вытягивается в тазобедренном суставе до точки, обычно достигаемой в конце стойки во время ходьбы, она внезапно сгибается и снова начинает ходить при условии, что контралатеральная конечность находится в положении, чтобы принять вес задней части.[12] Другая работа подтвердила важность афферентов бедра для генерации локомоторного ритма, так как сгибание бедра отменяет ритм, а разгибание усиливает его.[13]
Спинной мозг обрабатывает и интерпретирует проприоцепцию аналогично тому, как наш зрительная система обрабатывает информацию.[14] Когда просматривается картина, мозг интерпретирует общую поле зрения, в отличие от обработки каждого отдельного пикселя информации независимо, а затем получает изображение. В любой момент спинной мозг получает совокупность информации от всех рецепторов по всему телу, которая сигнализирует о проприоцептивном «образе», представляющем время и пространство, и вычисляет, какие нейроны возбуждать следующими, на основе самых недавно воспринятых «образов». Важность CPG заключается не только в ее способности генерировать повторяющиеся циклы, но также в получении, интерпретации и прогнозировании соответствующих последовательностей действий во время любой части пошагового цикла, то есть зависимости от состояния. Затем периферийный вход предоставляет важную информацию, на основе которой вероятности того, что данный набор нейронов будет активен в любой момент времени, может быть точно настроен на данную ситуацию во время определенной фазы пошагового цикла. Прекрасный пример этого - механическое воздействие на спина лапы кошки. Когда стимул применяется во время фазы качания, мышцы-сгибатели этой конечности возбуждаются, и результат усиливается. сгибание чтобы перешагнуть препятствие, создавшее стимул.[15] Однако, когда тот же самый стимул применяется во время стойки, разгибатели возбуждаются. Таким образом, функциональная связь между механорецепторы и конкретные межнейронный популяции в спинном мозге варьируются в зависимости от физиологического состояния. Даже эффективность моносинаптический ввод из мышечные веретена к двигательному нейрону легко меняется от одной части шагового цикла к другой, в зависимости от того, бежит ли человек или идет.[16]
В отсутствие CPG, контролируемого мозгом, как это происходит при полном повреждении спинного мозга, сенсорная обратная связь очень важна для создания ритмической локомоции. Во-первых, локомоторные движения могут быть инициированы или заблокированы некоторыми проприоцептивными афферентными сигналами.[12] Другая работа подтвердила важность афферентов бедра для генерации локомоторного ритма, так как сгибание бедра отменяет ритм, а разгибание усиливает его.[13] Во-вторых, проприоцептивные афференты могут участвовать в адаптации скорости ходьбы, в определении общей продолжительности цикла и в регулировании структуры подфаз цикла шага (т. Е. Качелей, стойки), что требуется для адаптации к скорости и межконечного сцепления.[16][17] В-третьих, проприоцептивные афференты участвуют в определении уровня мышечной активности через различные рефлекторные пути.[18]
Доказательства развития
Ультразвуковые записи захватили в утробе изображения человека плоды на 13–14 неделе беременности «ползание и лазание» с чередованием шагов.[19] Начало шагового развития плода предшествует развитию и миелинизации большинства нисходящих путей головного мозга, что убедительно свидетельствует о локомоторном CPG спинного мозга человека и координации и пластичности сенсорной обратной связи. В совокупности исследования первых послеродовой Год указывает на то, что локомоторный континуум простирается от неонатального шага до начала самостоятельной ходьбы, что дополнительно указывает на то, что локомоция человека контролируется CPG и взаимодействием сенсорного ввода.
Реабилитация
Травмированный спинной мозг - это «измененный» спинной мозг. После травмы надспинальные и спинномозговые источники контроля движений существенно отличаются от тех, которые существовали до травмы.[20] что приводит к изменению спинного мозга. Автоматичность позы и движения возникают из взаимодействий между периферической нервной системой (ПНС) и центральной нервной системой (ЦНС), которые работают в синергии, причем каждая система имеет собственные паттерны активации и торможения, которые могут генерировать скоординированные двигательные эффекты.
Электрическая стимуляция
Многочисленные эксперименты продемонстрировали, что электрическая стимуляция (ЭС) пояснично-крестцового расширения и дорзального корешка может вызывать двигательные ЭМГ-паттерны и даже ступенчатые движения задних конечностей у животных и людей с острым и хроническим нижним позвоночником.[21][22] Повышенная амплитуда стимуляции приводила к увеличению амплитуды ЭМГ и увеличению частоты ритмической активности. Высокие частоты стимуляции (> 70 Гц) вызывают тоническую активность мускулатуры ног, что позволяет предположить, что стимуляция верхнего поясничного отдела может активировать нейронные структуры, которые затем задействуют интернейроны, участвующие в CPG.[23]
Тренировка на беговой дорожке
Тренировка на беговой дорожке (более известная как тренировка на беговой дорожке с поддержкой веса тела) может выполняться вручную (терапевт) или с помощью робота. При обучении на беговой дорожке с ручным управлением терапевты оказывают помощь, чтобы облегчить принятие вертикальной позы и нормальную схему ходьбы.[24] Терапевт может оказывать помощь тазу, ноге и ступне пациента, а третий терапевт контролирует настройки беговой дорожки.[25] При обучении на беговой дорожке с помощью роботов устройство заменяет потребность терапевта в помощи пациенту в создании нормальной схемы шага. В настоящее время доступны три разные модели: Локомат Hocoma, AutoAmbulator HealthSouth и Механизированный тренажер походки II.[25] Lokomat - это управляемый ортез для ходьбы, который состоит из экзоскелета с компьютерным управлением, который крепится к ногам пациента и удерживается на беговой дорожке.[24] В дополнение к беговой дорожке с ременным приводом и подвесному лифту, AutoAmbulator HealthSouth также включает в себя пару шарнирных рычагов (которые приводят в движение тазобедренные и коленные суставы) и две вертикальные конструкции, в которых размещены компьютерные элементы управления и механизм разгрузки веса тела.[25] В отличие от первых двух, Mechanized Gait Trainer II не работает вместе с беговой дорожкой; вместо этого он основан на системе кривошипно-коромысла, которая обеспечивает движение конечностей, подобное эллиптическому тренажеру.[25] Тренировка на беговой дорожке с помощью роботов была разработана с учетом трех целей: 1. уменьшить физическую нагрузку и время терапевта, 2. улучшить повторяемость кинематики шага, и 3. увеличить объем двигательной тренировки.[25]
У людей с клинически полной травмой спинного мозга есть доказательства того, что тренировка на беговой дорожке может улучшить некоторые аспекты ходьбы при некоторой поддержке веса. Дитц и его коллеги сообщили, что после нескольких недель тренировок на беговой дорожке уровни нагрузки, которые могут быть перенесены на ноги клинически завершенных субъектов с травмой спинного мозга во время ходьбы на беговой дорожке, значительно возрастают.[26] При наступлении на беговую дорожку с опорой на вес тела у клинически завершенных субъектов, которые в противном случае не могут произвольно вызывать мышечную активность ног, могут быть выявлены ритмичные паттерны активации мышц ног.[27] Недавнее исследование продемонстрировало, что уровни активности мышц-разгибателей ног, зарегистрированные у клинически завершенных субъектов с травмой спинного мозга, значительно улучшились в течение нескольких недель степенных тренировок.[28] способность к шагу у клинически завершенных субъектов с травмой спинного мозга может улучшиться в ответ на пошаговую тренировку, но уровень улучшения не достиг уровня, который позволял бы полностью не зависеть от помощи во время полной нагрузки. Также было показано, что у людей с полной или моторно-полной травмой спинного мозга новый подход с использованием активирующего CPG медикаментозного лечения под названием Спиналон резко вызывает эпизоды ритмичных движений ног, подобных локомоторным, или соответствующую электромиографическую активность.[29] Во многом благодаря знаниям, полученным в ходе исследований на спинализованных животных, возникли два общих принципа возбуждения спинномозговых цепей, генерирующих шаг:
- Тренировка на беговой дорожке с опорой на вес тела улучшает способность пояснично-крестцового отдела спинного мозга выполнять шаги с опорой на вес тела.
- Модели сенсорного ввода, представленного во время тренировки опорно-двигательного аппарата являются критическими для приведения в движении пластичности, что опосредует восстановление опорно-двигательный аппарат.
Смотрите также
- Центральный генератор шаблонов
- Центральная нервная система
- Локомотив
- Проприоцепция
- Спинной мозг
- Повреждение спинного мозга
- Особые чувства
Рекомендации
- ^ Edgerton et al, 1998a. Двигательная способность, связанная с шаговой тренировкой, по сравнению со спонтанным восстановлением после спинализации у взрослых кошек. Журнал Neurophysiol. 79: 1329–1340.
- ^ Edgerton et al, 1999a. Сохранение способности задних конечностей к шагу у взрослых кошек с позвоночником после прекращения шаговой тренировки. Журнал нейрофизиологии. 81: 85–94.
- ^ Edgerton et al, 2002. Использование робототехники для оценки адаптивной способности поясничного отдела спинного мозга крыс. Прог. Brain Res. 137: 141–149.
- ^ Гертин П.А. (декабрь 2009 г.). "Центральный генератор паттернов для передвижения млекопитающих". Обзоры исследований мозга. 62: 345–56. Дои:10.1016 / j.brainresrev.2009.08.002. PMID 1972008.CS1 maint: использует параметр авторов (связь)
- ^ Эджертон В.Р., Харкема С.Дж., Добкин Б.Х. 2003. Переподготовка спинного мозга человека. В: Медицина спинного мозга: принципы и практика. Demos Medical Publishing, Глава 60, 817-826.
- ^ де Леон, Р.Д., Рой, Р.Р., и Эдгертон, В.Р., 2001 Опосредуется ли восстановление шага после травмы спинного мозга изменением существующих нервных путей или созданием новых путей? Физиотерапия. 81 (12): 1904-1911.
- ^ а б Dietz 2003. Генераторы паттернов спинного мозга для передвижения. Clin. Neurophysiol. 114: 1379–89.
- ^ Forssberg H, Grillner S, Rossignol S. 1975 Фазозависимое изменение рефлекса во время ходьбы у кошек с хроническим позвоночником. Исследование мозга. 85: 103–107.
- ^ Garraway SM, Hochman S. 2001. Серотонин увеличивает частоту первичной афферентно вызванной долговременной депрессии в нейронах глубоких задних рогов крыс. Журнал нейрофизиологии 85: 1864–1872.
- ^ Rygh LJ, Tjolsen A, Hole K, Svendsen F. 2002. Клеточная память в ноцицептивных схемах спинного мозга. Скандинавский журнал психологии. 43: 153–159.
- ^ Simonsen EB, Dyhre-Poulsen P. 1999. Амплитуда H-рефлекса камбаловидной мышцы человека во время ходьбы и бега. Журнал физиологии. 515: 929–939.
- ^ а б Grillner, S., Rossignol, S., 1978. О инициации фазы колебательного движения у кошек с хроническим позвоночником. Исследование мозга. 146, 269–277.
- ^ а б Пирсон, К.Г., Россиньол, С., 1991. Фиктивные двигательные паттерны у кошек с хроническим позвоночником. Журнал нейрофизиологии. 66, 1874–1887.
- ^ Реджи Эдгертон 2004. Пластичность нервной системы позвоночника после травмы. Ежегодный обзор неврологии. 27: 145–167.
- ^ Forssberg H.1979 Корректирующая реакция на спотыкание: фазозависимая компенсаторная реакция во время движения. Журнал нейрофизиологии, 42: 936–953.
- ^ а б Прекрасный Р.Г., Грегор Р.Дж., Рой Р.Р., Эджертон В.Р., 1990. Шагание задних конечностей с опорой на весовую нагрузку у взрослых кошек с позвоночником, тренируемых на беговой дорожке. Исследование мозга. 514: 206–218
- ^ Zehret al, 2003 Нейронный контроль ритмических движений руки человека: фазовая зависимость и модуляция рефлексов Гофмана в мышцах предплечья. Журнал нейрофизиологии. 89: 12–21.
- ^ Duysens J, Pearson KG. 1980. Ингибирование образования разрыва сгибателей путем нагрузки на мышцы-разгибатели голеностопного сустава у гуляющих кошек. Brain Res.187: 321–332.
- ^ Яннируберто и Таяни Ультрасонографическое исследование движений плода. Семинары по перинатологии 5: 175–181, 1981. [Web of Science] [Medline].
- ^ Dietz et al, 1998b. Двигательный паттерн у пациентов с параличом нижних конечностей: тренировочные эффекты и восстановление функции спинного мозга. Спинной мозг. 36: 380–390.
- ^ Grillner S, Zangger P. 1984. Влияние перерезки дорсального корешка на эфферентный моторный паттерн в задних конечностях кошки во время передвижения. Acta Physiologica Scandinavia. 120: 393–405.
- ^ Герасименко Ю.П., Авелев В.Д., Никитин О.А., Лавров И.А. 2003. Инициирование двигательной активности спинномозговых кошек с помощью эпидуральной стимуляции спинного мозга. Неврология и поведенческая физиология. 33: 247–254.
- ^ Димитриевич М.Р., Герасименко Ю., Пинтер М.М. 1998. Доказательства наличия генератора центральной модели позвоночника у людей. Анналы Нью-Йоркской академии наук. 860: 360–376.
- ^ а б Хорнби, Джордж Т., Земон, Дэвид Х. и Кэмпбелл, Дониэль. 2005. Тренировка на беговой дорожке с использованием роботизированного веса тела у лиц после неполной двигательной травмы спинного мозга. Физиотерапия, 85(1), 52-66.
- ^ а б c d е Винчестер, Патрисия и Куэрри, Росс. 2006. Роботизированные ортезы для тренировки на беговой дорожке с опорой на собственный вес. Клиники физической медицины и реабилитации Северной Америки, 17(1), 159-172.
- ^ Диц В., Коломбо Г., Йенсен Л., Баумгартнер Л. 1995. Двигательная способность спинного мозга у пациентов с параличом нижних конечностей. Анналы неврологии. 37: 574–582.
- ^ Maegele M, Muller S, Wernig A, Edgerton VR, Harkema SJ. 2002. Вовлечение спинномозговых моторных пулов во время произвольных движений по сравнению с шаганием после травмы спинного мозга человека. Журнал нейротравмы. 19: 1217–1229.
- ^ Wirz M, Colombo G, Dietz V. 2001. Долгосрочные эффекты локомоторной тренировки у спинального человека. Журнал неврологии, нейрохирургии и психиатрии. 71: 93–96.
- ^ Радхакришна М., Штойер И., Принц Ф, Робертс М., Монгеон Д., Киа М., Дайк С., Мэтт Дж., Вайланкур М., Гертен, Пенсильвания (декабрь 2017 г.). «Двойное слепое плацебо-контролируемое рандомизированное исследование фазы I / IIa (безопасность и эффективность) с буспироном / леводопой / карбидопой (Спиналон) у субъектов с полным повреждением спинного мозга AIS A или полным моторным AIS B». Текущий фармацевтический дизайн. 23 (12): 1789–1804. Дои:10.2174/1381612822666161227152200. PMID 28025945.
внешняя ссылка
- www.wingsforlife.com
- www.addlestonechiro.com
- www.sci-info-pages.com/levels.html
- Человек, потерявший тело
- [1]
- В исследовании для этой статьи в Википедии участвовал доктор Джейни Янг, внесший вклад в онлайн-семинар.
- Исследование для этой страницы включало обзорные статьи доктора Эдгертона.
- Исследование для этой статьи в Википедии было проведено в рамках курса нейромеханики движения (APPH 6232), предлагаемого в Школе прикладной физиологии Технологического института Джорджии.